

 联系我们
联系我们

发那科关于数控系统的研究可以追溯到1956年,具备前瞻性的日本技术专家预见到3C时代的到来,并组建了科研队伍。而将在数控系统的优势用于机器人身上,发那科的工业机器人精度也很高,据悉,发那科的多功能六轴小型机器人的重复定位精度可以达到正负0.02mm。此外,发那科工业机器人与其他企业相比独特之处在于:工艺控制更加便捷,同类型机器人底座尺寸更小、更拥有**的手臂设计。
值得一提的是,发那科更将数控机床精加工的刀片补偿功能应用在机器人身上,从算法上植入了刀片补偿的功能,这使得机器人在精加工切割的过程中可以实现一圈一圈往里边走,而安川的机器人本体本身不具备这个功能,要实现这一功能只能通过二次开发进行功能补偿,而这也是很有些客户反映安川机器人不太方便的地方。
但是发那科在机器人的稳定性上,做得还不是*好,在满负载运行的过程中,当速度达到80%的时候,发那科的机器人就会报警,这也说明了发那科机器人的过载能力并不是很好。所以发那科的优势在于轻负载、高精度的应用场合,这也是发那科的小型化机器人(24KG以下的)畅销的原因。

在R-30iB机器人控制柜的准备使用此功能,您需要安装可选软件包:
J684 high sensitivity collision detection package
J878 payload and payload setup confirmation
1.2 主要功能
高灵敏度,其包括碰撞检测分组碰撞检测以高灵敏度和负载的评价函数。当与工件把持或机器人碰撞可以检测碰撞,并停止所述机器人。你可以大限度地减少碰撞损坏和把握机器人。
1.3 相关手册
Fanuc r-30ib controller options function operation manual (b-83284en-2-u 04) high sensitivity collision detection software package
2 功能说明
2.1 设置
高灵敏度碰撞检测功能的使用首先需要设定爪载荷和安装在机器人上的装置的信息。由于该功能需要使用信息区域来检测使用安装在机器人上的装置的碰撞,
2.2设置碰撞检测
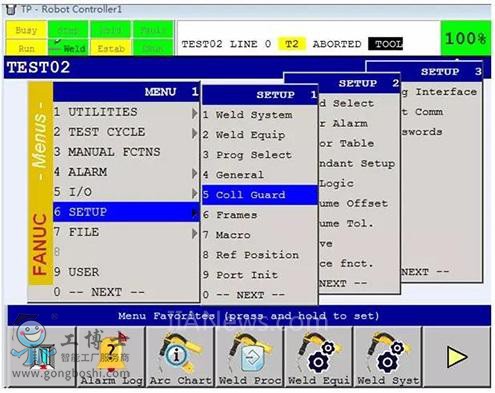
一。按下“菜单”按钮,设置中的“coll guard”选项将显示如下
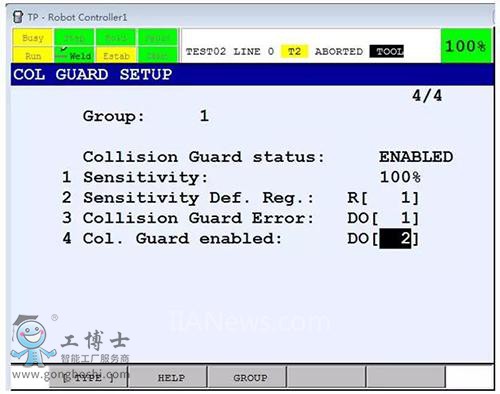
2. 设置碰撞检测:
将碰撞保护状态冲突检测状态设置为启用以进行碰撞检测。
灵敏度碰撞检测灵敏度,设定的1%至200%的范围内,默认设置为100%,较大的百分比值冲击检测更敏感。增加百分比值,必要时,以增加碰撞的检测灵敏度;在需要减小误差值报警减少百分比。
灵敏度定义。规则。灵敏度保护寄存器。使用灵敏度保护寄存器中设置的偏移值,调整偏移大小以减少碰撞。
碰撞保护错误碰撞检测错误,使用DO显示碰撞检测报警信息。
碰撞保护启用碰撞检测使能端,使用碰撞检测DO显示被接通。
注意事项:
1)当碰撞检测灵敏度百分比小于100%时,碰撞检测功能将不能正常有效地工作。
2)如果机器人不断地吸收碰撞力,将降低机器人的使用寿命。
2.3碰撞检测和碰撞调整开关
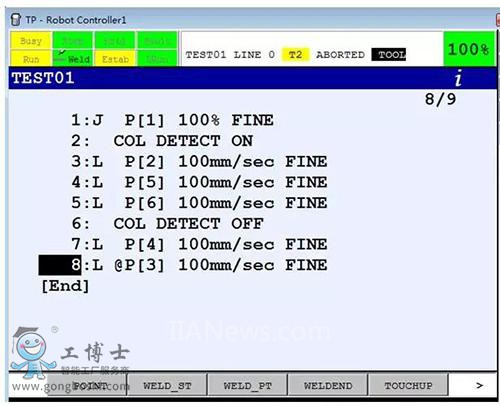
一。col detect on和col detect off命令可用于设置碰撞检测的打开和关闭。如下图所示,可以打开test01中3号线到5号线的碰撞检测程序进行碰撞检测;关闭7号线到8号线的碰撞检测程序进行碰撞检测。
注意事项:
1)当高灵敏度碰撞检测功能关闭时,基本的碰撞检测功能也关闭。因此,当关闭高灵敏度碰撞检测功能时,需要尽可能地减小机器人的运动区域,以避免机器人的不可预测的碰撞损伤。
2)高灵敏度碰撞检测打开和关闭运动被施加到使用该命令的组。
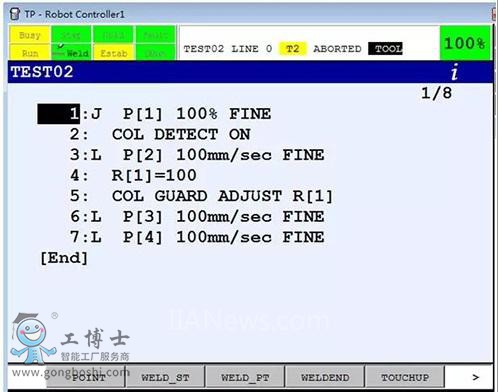
2。通过使用col detect adjust指令,可以通过预设的灵敏度保护寄存器设置值R【1】来调整机器人手臂姿态以减少碰撞。R[1]值的大小表示调整量的大小。在下图所示的TEST02程序中,第6至7行使用碰撞调整来减少或避免机器人与工件之间的碰撞。
注意事项:
1)如果在机器人系统中使用软浮动或机器人将制动器保持打开或未设置校准,则不能使用高灵敏度碰撞检测功能。
2)如果负荷超过机器人的额定负载,使用碰撞都会偏差的高灵敏度检测的。
3 功能总结
高灵敏度的碰撞检测包能有效检测机器人或手柄与工件的碰撞,限度地减小机器人与手柄的碰撞损伤。它通常与碰撞自动恢复功能结合使用。